Книга: Башенные краны
Навигация: Начало Оглавление | Другие книги | Отзывы:  - 4
- 4
 - 4
- 4§ 47. Асинхронный электропривод, в котором используется электродвигатель с фазным ротором
Частоту вращения асинхронного электродвигателя с фазным ротором можно регулировать, изменяя величину сопротивления его роторной цепи. На башенных кранах электродвигателями управляют с помощью магнитных или силовых контроллеров.
Принципиальная схема управления электродвигателем с помощью магнитного контроллера показана на рис. 91, а. В первом положении командоконтроллера «Вперед» замыкается контакт S1-1 и включается катушка К1- Контактор К1 включает статор двигателя и тормозной электромагнит в сеть. В цепь ротора двигателя включено полное сопротивление пускорегулирующего реостата, и двигатель работает на характеристике 1 с частотой вращения при заданно моменте сопротивления Мс (рис. 91, б). Во втором положении зам кается контакт Sl-3 командоконтроллера и включается контактор К который закорачивает часть сопротивления реостата. Двигатель раб тает на характеристике II с частотой вращения. В третьем положении контроллера включается контактор К4, который закорачивает обмотку ротора двигателя, и двигатель будет работать на естестве ной характеристике 111 с частотой вращения (рис. 91, б).
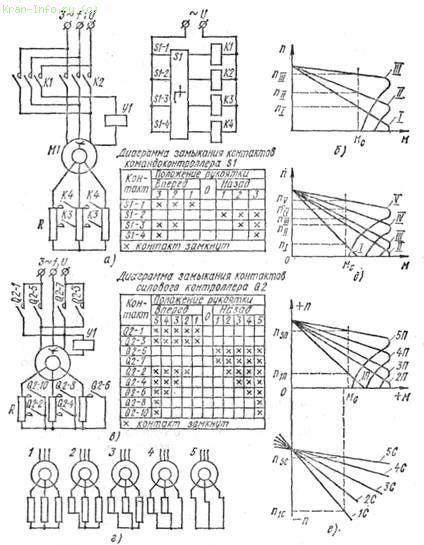
Рис. 91. Управление асинхронными электродвигателями с фазным ротором:
а — принципиальная схема управления с помощью магнитного контроллера, б — механические характеристики двигателя при управлении магнитным контроллером, в— принципиальная схема управления с помощью силового контроллера, г — цепь ротора двигателя при первом, втором, третьем, четвертом и пятом положениях рукоятки силового контроллера, д — механические характеристики двигателя при управлении силовым контроллером, е — механические характеристики двигателя грузовой лебедки при управлении силовым контроллером
Принципиальная схема управления двигателем с помощью силового контроллера показана на рис. 91, е. В первом положении при включении «Вперед» замыкаются контакты Q2-1 и Q2-3 контроллера включая в сеть обмотку статора двигателя и тормозной магнит. Двигатель работает на характеристике 1 (рис. 91, д). Во втором, третьем и четвертом положениях последовательно закорачиваются ступени реостата R (см. рис. 91, г), и двигатель работает соответственно на характеристиках 11, 111 и IV. В пятом положении контроллер пускорегулирующий реостат R будет полностью закорочен, и двигатель будет работать на естественной характеристике с частотой вращения (рис. 91, д).
Искусственные (реостатные) механические характеристики, получаемые при работе двигателя с включенным добавочным сопротивлением в цепи ротора, имеют больший наклон к оси моментов, т. е. обладают меньшей жесткостью. Чем больше введенное в цепь ротора сопротивление, тем круче идет характеристика, тем меньше ее жесткость и меньше частота вращения двигателя при одном и том же моменте сопротивления. Следовательно, при постоянной нагрузке на валу частота вращения двигателя будет возрастать при уменьшении сопротивления в цепи его ротора (при переводе рукоятки управления в последнее положение) и уменьшаться при увеличении сопротивления.
Особенность работы двигателя грузовой лебедки заключается в том, что подвешенный на крюке груз стремится вращать лебедку в направлении спуска. При включении двигателя на подъем, если его вращающий момент больше момента сопротивления, создаваемого грузом, двигатель будет вращаться в направлении подъема груза. Изменяя величину сопротивления в цепи ротора, можно обеспечить работу двигателя на искусственных и естественной характеристиках (кривые 1П, 2П, ЗП, 4П, 5П на рис. 91, е) и при достаточно большой нагрузке регулировать частоту вращения двигателя. Когда двигатель включен в направлении спуска, то груз не только преодолевает силы трения, но и стремится ускорить вращение двигателя в направлении спуска. Скорость двигателя очень быстро достигает синхронной, после чего двигатель начинает работать как генератор, преодолевая момент (усилие) груза, т. е. тормозя механизм.
Если сопротивление в цепи ротора двигателя полностью закорочено, то скорость опускания груза будет на 5—10% больше синхронной скорости (характеристика 5С и частота вращения при моменте на рис. 91, е). Увеличением роторного сопротивления уменьшить скорость спуска груза нельзя, наоборот, она будет увеличиваться при включении сопротивления в цепь ротора двигателя.
Из сказанного видно, что скорость грузовой лебедки можно регулировать изменением величины роторного сопротивления двигателя только при подъеме тяжелого груза. При подъеме легкого груза скорость этим способом практически не регулируется. При спуске как пустого крюка, так и всякого груза, скорость всегда близка к синхронной или чуть больше ее при закороченном сопротивлении ротора и увеличивается при включении этого сопротивления.
· § 44. Назначение, правила выполнения и классификация электрических схем
· § 45. Общие положения о регулировании скорости крановых механизмов
· § 46. Асинхронный электропривод, в котором использован электродвигатель с короткозамкнутым ротором
> · § 47. Асинхронный электропривод, в котором используется электродвигатель с фазным ротором
· § 48. Асинхронный электропривод с созданием на валу электродвигателя добавочного тормозного момента
· § 49. Многодвигательный электропривод с планетарным механизмом
· § 50. Электроприводы грузовых лебёдок башенных кранов с большой высотой подъема груза
· § 51. Тиристорная схема управления асинхронным электродвигателем
Навигация: Начало Оглавление | Другие книги | Отзывы: - 4
- 4Книга: Башенные краны
 Оставить свой отзыв
Оставить свой отзыв
| автор: | хУипутоло 
Отзыв полезен?
Да 1 /
Нет
|
# 4 |
| комментарий: | ДА кому это вообще может быть интересно | |
| ответить | Дата комментария: 14.10.2019 17:05:25 | |
| автор: | александр
Отзыв полезен?
Да 10 /
Нет 9
|
# 3 |
| комментарий: | Все нормально!Надо еще марки редукторов обозначить на каждый кран, чертежи с размерами шестерен и валов | |
| ответить | Дата комментария: 17.04.2015 16:27:44 | |
| автор: | валерий
Отзыв полезен?
Да 19 /
Нет 17
|
# 2 |
| комментарий: | Да литература хорошая но информацыи мало а так молодцы что хотя даете такую информацыю спасибо большое | |
| ответить | Дата комментария: 02.03.2014 11:14:22 | |
| автор: | Алекс
Отзыв полезен?
Да 36 /
Нет 17
|
# 1 |
| комментарий: | Отличная книга, буду рекомендовать ее всем знакомым крановщикам, хотя многое устарело - азы остаются неизменными. | |
| ответить | Дата комментария: 16.04.2013 00:01:29 | |