Книга: Башенные краны
Навигация: Начало Оглавление | Другие книги | Отзывы:  - 4
- 4
 - 4
- 4§ 49. Многодвигательный электропривод с планетарным механизмом
Многодвигательный привод механизма подъема груза обеспечивает регулирование скорости при подъеме и спуске грузов. Грузовая лебедка с таким приводом состоит из барабана для наматывания каната, планетарного редуктора, двух приводных электродвигателей и двух колодочных тормозов.
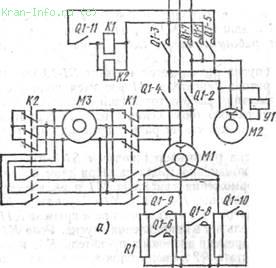

Рис. 95. Двухдвигательный привод грузовой лебедки: а — принципиальная электрическая схема, б -механические характеристики привода
На рис. 95, а показана электрическая схема двухдвигательного привода с фазным Ml и короткозамкнутым М2 электродвигателями и двумя колодочными тормозами, один из которых управляется тормозным электромагнитом У1, а другой — электрогидравлическим толкателем с электродвигателем МЗ. Для управления приводом использован контроллер Q1 с нестандартной схемой замыкания контактов.
Различная комбинация включения электродвигателей в сочетании с планетарной передачей редуктора обеспечивает получение нескольких скоростей подъема и спуска.
В первом положении подъема включены электродвигатель М2 и тормозной электромагнит У1. Привод работает на характеристике 1П (рис. 95, б). Во втором положении подъема включены приводные электродвигатели Ml и М2, разомкнуты оба тормоза и в цепи ротора 3~50ГЦ, 3303 000 электродвигателя Ml закорочена одна ступень пускорегулирующего реостата R1. Привод работает на характеристике 2П. В третьем, четвертом и пятом положениях подъема последовательно закорачиваются остальные ступени пускорегулирующего реостата R1, и привод работает соответственно на характеристиках ЗП, 4П и 5П.
В первом положении спуска включен короткозамкнутый электродвигатель М2, и привод работает на характеристике 1С. Во втором положении спуска включены оба приводных электродвигателя. Частота вращения электродвигателя Ml регулируется тормозом с электрогидравлическим толкателем, так как электродвигатель МЗ присоединен к цепи ротора электродвигателя Ml. Совместная работа приводных электродвигателей и тормоза с электрогидравлических толкателем обеспечивает работу привода на характеристике 2С.
В третьем положении спуска в цепи ротора электродвигателя Ml закорачиваются две ступени пускорегулирующего реостата R1, а электродвигатель МЗ переключается на статорную цепь электродвигателя Ml, обеспечивая полное растормаживание тормоза. Привод работает на характеристике ЗС. В четвертом и пятом положениях спуска пускорегулирующий реостат R1 закорочен полностью, и совместная работа приводных электродвигателей обеспечивает работу привода на характеристике 4С, 5С.
В приводе иногда устанавливают два электродвигателя с короткозамкнутыми роторами или два электродвигателя с контактными кольцами.
· § 44. Назначение, правила выполнения и классификация электрических схем
· § 45. Общие положения о регулировании скорости крановых механизмов
· § 46. Асинхронный электропривод, в котором использован электродвигатель с короткозамкнутым ротором
· § 47. Асинхронный электропривод, в котором используется электродвигатель с фазным ротором
· § 48. Асинхронный электропривод с созданием на валу электродвигателя добавочного тормозного момента
> · § 49. Многодвигательный электропривод с планетарным механизмом
· § 50. Электроприводы грузовых лебёдок башенных кранов с большой высотой подъема груза
· § 51. Тиристорная схема управления асинхронным электродвигателем
Навигация: Начало Оглавление | Другие книги | Отзывы: - 4
- 4Книга: Башенные краны
 Оставить свой отзыв
Оставить свой отзыв
| автор: | хУипутоло 
Отзыв полезен?
Да 1 /
Нет
|
# 4 |
| комментарий: | ДА кому это вообще может быть интересно | |
| ответить | Дата комментария: 14.10.2019 17:05:25 | |
| автор: | александр
Отзыв полезен?
Да 10 /
Нет 9
|
# 3 |
| комментарий: | Все нормально!Надо еще марки редукторов обозначить на каждый кран, чертежи с размерами шестерен и валов | |
| ответить | Дата комментария: 17.04.2015 16:27:44 | |
| автор: | валерий
Отзыв полезен?
Да 19 /
Нет 17
|
# 2 |
| комментарий: | Да литература хорошая но информацыи мало а так молодцы что хотя даете такую информацыю спасибо большое | |
| ответить | Дата комментария: 02.03.2014 11:14:22 | |
| автор: | Алекс
Отзыв полезен?
Да 36 /
Нет 17
|
# 1 |
| комментарий: | Отличная книга, буду рекомендовать ее всем знакомым крановщикам, хотя многое устарело - азы остаются неизменными. | |
| ответить | Дата комментария: 16.04.2013 00:01:29 | |