Книга: Башенные краны
Навигация: Начало Оглавление | Другие книги | Отзывы:  - 4
- 4
 - 4
- 4§ 51. Тиристорная схема управления асинхронным электродвигателем
В связи с увеличением длины канатов крюковой подвески на кранах с большой высотой подъема возникла необходимость в плавном регулировании скорости механизма поворота, поэтому на этих кранах применяют специальные схемы электроприводов. В схеме на рис. 99 механизм поворота приводится асинхронным электродвигателем Ml с фазным ротором, управляемым с помощью тиристоров.
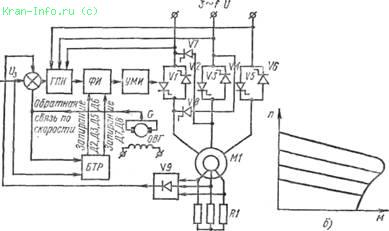
Рис. 99. Электропривод механизма поворота с тиристорным управлением:
а — функциональная электрическая схема, б — механические характеристики привода; ГПН — блок генератора пилообразного напряжения, ФИ — блок формирования импульсов, УМ И — блок усиления мощности импульсов, БТР — блок тормозного режима, ОВГ — обмотка возбуждения тахогенератора; G — тахогенератор, V9 — выпрямитель цепи обратной связи по току, U — задающее напряжение
В приводе использован параметрический способ регулирования скорости, основанный на изменении напряжения, подводимого к статору электродвигателя. Развиваемый электродвигателем вращающий момент пропорционален квадрату подводимого напряжения, поэтому изменение напряжения на зажимах электродвигателя вызывает изменение частоты вращения его ротора.
На схеме тиристоры VI — V6 включены встречно-параллельно в каждую фазу статора электродвигателя и выполняют роль быстродействующих бесконтактных переключателей. Напряжение, подводимое к электродвигателю, изменяется управлением проводимости тиристоров. Для получения жестких механических характеристик в схеме предусмотрена обратная связь по частоте вращения, выполненная с помощью тахогенератора G, и динамическое торможение асинхронного электродвигателя, которое осуществляется с помощью тиристоров V7 и V8, причем переход от двигательного режима работы электродвигателя к тормозному режиму происходит автоматически с помощью блока тормозного режима БТР.
Тиристорами управляют с помощью электронной схемы. Управляющее напряжение постоянного тока снимается с резистора с переменным сопротивлением, подается в блок генератора пилообразного напряжения ГПН и сравнивается с пилообразным напряжением синхронным и синфазным с сетью. Резистор связан с командоконтроллером, и величина его сопротивления зависит от положения рукоятки управления. При установке рукоятки управления в одно из положений вправо (влево) в результате отклонения напряжения пилообразной формы относительно напряжения управления появляется импульс, длительность которого зависит от значения напряжения управления, т. е. от положения, в которое установлена рукоятка управления. Этот импульс поступает в блок формирования импульса ФИ, в котором происходит его предварительное усиление и преобразование в импульс соответствующей формы. Преобразованный импульс поступает в блок усиления мощности импульсов У МИ, где усиливается до значений, необходимых для надежного управления тиристорами, после чего поступает на управляющие электроды тиристоров. При этом открыты и управляются тиристоры VI — V6, тиристоры V7 и V8 заперты и электродвигатель Ml работает в двигательном режиме.
В двигательном режиме работы привода напряжение управления больше напряжения обратной связи, снимаемого с тахогенератора G, и ток протекает в соответствии с полярностью напряжения управления. Момент сопротивления механизма поворота в процессе работы крана может изменяться в зависимости от ветровой нагрузки и подветренной площади обрабатываемого груза. При изменении знака момента сопротивления на валу электродвигателя система начинает ускоряться. Напряжение обратной связи становится больше напряжения управления, вследствие чего изменяется направление тока в цепи и появляются импульсы в блоке БТР. Эти импульсы поступают в блок ФИ, который запирает тиристоры V2, V3, V5, V6 и открывает тиристоры V7, V8 (тиристоры VI и V4 остаются открытыми). Электродвигатель начинает работать в режиме динамического торможения, затормаживая механизм поворота. Когда частота вращения привода уменьшится до величины, заданной управлением, напряжение обратной связи снова станет меньше напряжения управления. При этом исчезнут импульсы в блоке БТР, блок ФИ запрет тиристоры V7 и V8, откроет тиристоры V2, V3, V5, V6 и электр двигатель автоматически перейдет в двигательный режим работы.
Механические характеристики привода (рис. 99, б) обеспечивают работу механизма поворота крана с различной скоростью, величина которой зависит от положения рукоятки командоконтроллера.
· § 44. Назначение, правила выполнения и классификация электрических схем
· § 45. Общие положения о регулировании скорости крановых механизмов
· § 46. Асинхронный электропривод, в котором использован электродвигатель с короткозамкнутым ротором
· § 47. Асинхронный электропривод, в котором используется электродвигатель с фазным ротором
· § 48. Асинхронный электропривод с созданием на валу электродвигателя добавочного тормозного момента
· § 49. Многодвигательный электропривод с планетарным механизмом
· § 50. Электроприводы грузовых лебёдок башенных кранов с большой высотой подъема груза
> · § 51. Тиристорная схема управления асинхронным электродвигателем
Навигация: Начало Оглавление | Другие книги | Отзывы: - 4
- 4Книга: Башенные краны
 Оставить свой отзыв
Оставить свой отзыв
| автор: | хУипутоло 
Отзыв полезен?
Да 1 /
Нет
|
# 4 |
| комментарий: | ДА кому это вообще может быть интересно | |
| ответить | Дата комментария: 14.10.2019 17:05:25 | |
| автор: | александр
Отзыв полезен?
Да 10 /
Нет 9
|
# 3 |
| комментарий: | Все нормально!Надо еще марки редукторов обозначить на каждый кран, чертежи с размерами шестерен и валов | |
| ответить | Дата комментария: 17.04.2015 16:27:44 | |
| автор: | валерий
Отзыв полезен?
Да 19 /
Нет 17
|
# 2 |
| комментарий: | Да литература хорошая но информацыи мало а так молодцы что хотя даете такую информацыю спасибо большое | |
| ответить | Дата комментария: 02.03.2014 11:14:22 | |
| автор: | Алекс
Отзыв полезен?
Да 36 /
Нет 17
|
# 1 |
| комментарий: | Отличная книга, буду рекомендовать ее всем знакомым крановщикам, хотя многое устарело - азы остаются неизменными. | |
| ответить | Дата комментария: 16.04.2013 00:01:29 | |