Книга: Башенные краны
Навигация: Начало Оглавление | Другие книги | Отзывы:  - 4
- 4
 - 4
- 4§ 60. Электрическая схема крана K5-573
Электрическая схема крана КБ-573 отличается от схемы крана КБ-401 тем, что в ней отсутствует привод механизма передвижения крана, применены специальные схемы электроприводов механизмов поворота крана и подъема груза и добавлены электроприводы грузовой тележки и выдвижения башни.
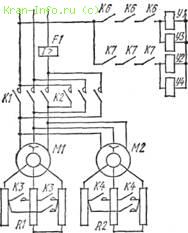
Рис. 117. Принципиальная электрическая схема электропривода механизма поворота крана КБ-573
Для поворота стрелы на кране КБ-573 применяют два механизма поворота, электродвигатели которых Ml и М2 управляются магнитным контроллером (рис. 117). Последовательность замыкания контактов командоконтроллера S1 приведена в табл. 16.
Таблица 16. Замыкания контактов командоконтроллера механизма поворота крана КБ-573
(к рис. 117)
|
Положения рукоятки |
|||||||
|
Контакт |
«Вправо» |
0 |
«Влево» |
||||
|
3 |
2 |
1 |
I |
2 |
3 |
||
|
S1-1 |
X |
||||||
|
S1-5 |
X |
X |
X |
||||
|
S1-7 |
X |
X |
X |
||||
|
S1-9 |
X |
X |
X |
X |
|||
|
S1-11 |
X |
X |
|||||
X — контакт замкнут.
В первом положении рукоятки влево включаются К2, К5, Кб и К7. Включаются тормозные электромагниты Yl—Y4, а питание катушек Кб, К7 замкнувшимися контактами К7 ставится на самоблокировку, в обход контактов К5. Реле времени KS отпадает с выдержкой времени.
К силовой цели крана
Двигатели работают с полным сопротивлением реостата в двух фазах каждого ротора и отключенной третьей фазой.
Во втором положении рукоятки включается контактор КЗ, который присоединяет третью фазу ротора и закорачивает ступень сопротивления реостата электродвигателя Ml. Частота вращения возрастает.
В третьем положении включается контактор К4, присоединяя третью фазу и закорачивая ступень сопротивления реостата электродвигателя М2. Скорость поворота возрастает до максимальной величины.
При установке рукоятки в соответствующие положения вправо привод работает аналогично.
Для плавной остановки механизмов поворота используется торможение, осуществляемое двухпедальным выключателе с ножным приводом и с размыкающими контактами S4, S5.
После разгона крана на третьем положении рукоятка устанавливается в нулевое положение. Двигатели отключаются от сети и кран продолжает поворот по инерции. При нажатии первой педали pa3iv кается контакт S4, отключается контактор Кб, тормозные электромагниты Y1 и Y3. Каждый механизм поворота начинает притормаживаться одним тормозом. Плавность притормаживания обеспечивается периодическим нажатием и отпусканием педали.
При снижении скорости поворота до минимальной величины на> мается вторая педаль выключателя, размыкающая контакты.
Контактор К7 отключает питание всех четырех тормозных электромагнитов и поворот крана прекращается.
Механизм подъема груза крана КБ-573 состоит из двух грузовых лебедок. Электрическая схема привода показана на рис. 118 и 119.
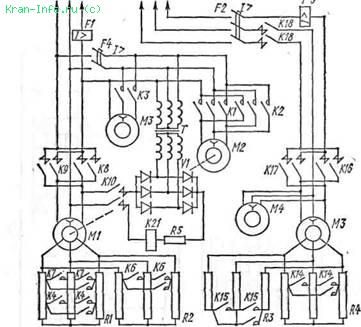
Рис. 118. Принципиальная электрическая схема силовой цепи электропривода механизма подъема груза крана КБ-573
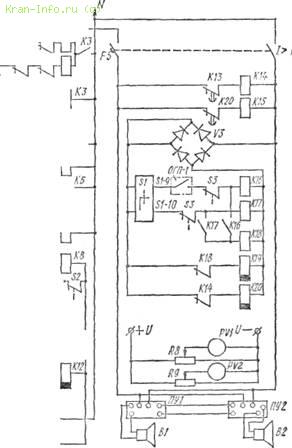
Рис. 119. Принципиальная электрическая схема цепи управления электропривода механизма подъема груза крана КБ-573
Управление электродвигателями производится магнитным контроллером с помощью командоконтроллера S1. Для получения посадочной скорости в приводе использована тормозная машина переменного тока, сочлененная с электродвигателем Ml, и динамическое торможение электродвигателя. На лебедках установлены тормоза с электрогидравлическими толкателями, управляемыми электродвигателями МЗ и М4. Последовательность замыкания контактов командоконтроллера приведена в табл. 17.
Таблица 17. Замыкания контактов командоконтроллера механизма подъема груза крана КБ-573 (к рис. 119)
|
Контакт |
Положения рукоятки |
|||||||||
|
«Спуск» |
0 |
«Подъем» |
||||||||
|
4 |
I з |
2 |
1 |
1 |
2 | 3 |
4 |
||||
|
S1-1 |
X |
|||||||||
|
S1-2 |
X |
|||||||||
|
S1-3 |
X |
X |
X |
X |
||||||
|
S 1-4 |
X |
X |
X |
X |
X |
|||||
|
S 1-5 |
X |
X |
X |
X |
X |
X |
||||
|
S1-6 |
X |
X |
X |
X |
||||||
|
S1-7 |
X |
|||||||||
|
S1-8 |
X |
X |
||||||||
|
S1-9 |
X |
|||||||||
|
S 1-10 |
X |
|||||||||
|
S1-11 |
X |
X |
||||||||
|
S1-12 |
1 |
X |
X |
|||||||
X —контакт замкнут.
Работа схемы при подъеме груза. В первом положении подъема включены контакторы К.8, КЗ, К1- Работают двигатели Ml лебедки, МЗ гидротолкателя и тормозная машина М2. Скорость подъема груза минимальная.
Во втором положении размыкается контактор KU отключая тормозную машину, и замыкается К4, закорачивая ступень сопротивления реостата двигателя Ml. Скорость подъема груза увеличивается.
В третьем положении включается контактор Кб, замыкая ступень сопротивления реостата двигателя Ml и отключая реле времени К12. Затем с выдержкой времени включается контактор, закорачивающий последние ступени реостата двигателя Ml. Скорость подъема возрастает.
В четвертом положении включаются контакторы К16, К18, и с выдержкой времени последовательно включаются контакторы ускорения К14, К15. Обе лебедки работают на подъем, обеспечивая максимальную скорость подъема груза.
Работа схемы при спуске груза. В первом положении спуска включаются динамическое торможение двигателя Ml и тормозная машина М2, обеспечивая малую скорость спуска.
Во втором положении отключается контактор Кб, и скорость опускания груза увеличивается за счет увеличения сопротивления реостата двигателя Ml.
В третьем положении отключается тормозная машина М2 и динамическое торможение; двигатель Ml включается на спуск, а ступени его реостата закорачиваются контакторами К4, Кб, К7, включающимися с выдержкой времени. Груз опускается с рабочей скоростью.
В четвертом положении включаются двигатели МЗ, М4, и совместна я работа лебедок обеспечивает спуск груза с максимальной скоростью.
Для контроля за количеством каната на барабанах лебедок предусмотрены ограничители S2 и S3. Эти ограничители автоматически отключают соответствующие лебедки при максимальном и минимальном числе витков каната на барабане каждой лебедки. Ограничители состоят из конечного выключателя ВУ-250А и цепной передачи, связывающей ограничитель с валом барабана лебедки.
На каждой лебедке установлен указатель числа оборотов барабана лебедки. Указатель состоит из потенциометра R8, R9, поводок которого приводится во вращение от выходного вала конечного выключателя ограничителей числа витков грузового каната, и установленного в кабине управления вольтметра PV1, PV2 со шкалой, градуированной в числах оборотов барабана лебедки.
Переговорное устройство машиниста с такелажником состоит из двух блоков усилителей ПУ1, ПУ2, установленных на опоре крана и в кабине управления, двух микрофонов и громкоговорителей В1 и В2. Переговорное устройство получает питание от электрической схемы крана.
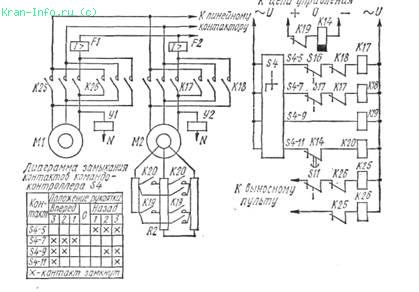
Рис. 120. Принципиальная электрическая схема электроприводов грузовой тележки и подъема башни крана К.Б-573
Для перемещения грузовой тележки применен электропривод (рис. 120), аналогичный электроприводу механизма поворота крана С-981 (см. рис. 115), но без дополнительного притормаживающего тормоза.
В приводе выдвижения башни использован асинхронный электродвигатель с короткозамкнутым ротором, управляемый универсальным переключателем и кнопками с выносного пульта управления (см. рис. 120).
· § 57. Электрическая схема крана АБКС-5
· § 58. Электрическая схема крана КБ-401А
· § 59. Электрическая схема крана С-981А
> · § 60. Электрическая схема крана K5-573
· § 61. Электрическая схема крана КБ-503
· § 62. Электрическая схема крана КБ-674
· § 63. Управление кранами
Навигация: Начало Оглавление | Другие книги | Отзывы: - 4
- 4Книга: Башенные краны
 Оставить свой отзыв
Оставить свой отзыв
| автор: | хУипутоло 
Отзыв полезен?
Да 1 /
Нет
|
# 4 |
| комментарий: | ДА кому это вообще может быть интересно | |
| ответить | Дата комментария: 14.10.2019 17:05:25 | |
| автор: | александр
Отзыв полезен?
Да 10 /
Нет 9
|
# 3 |
| комментарий: | Все нормально!Надо еще марки редукторов обозначить на каждый кран, чертежи с размерами шестерен и валов | |
| ответить | Дата комментария: 17.04.2015 16:27:44 | |
| автор: | валерий
Отзыв полезен?
Да 19 /
Нет 17
|
# 2 |
| комментарий: | Да литература хорошая но информацыи мало а так молодцы что хотя даете такую информацыю спасибо большое | |
| ответить | Дата комментария: 02.03.2014 11:14:22 | |
| автор: | Алекс
Отзыв полезен?
Да 36 /
Нет 17
|
# 1 |
| комментарий: | Отличная книга, буду рекомендовать ее всем знакомым крановщикам, хотя многое устарело - азы остаются неизменными. | |
| ответить | Дата комментария: 16.04.2013 00:01:29 | |