Книга: Грузоподъемные машины
Навигация: Начало Оглавление | Другие книги | Отзывы:  - 0
- 0
 - 0
- 0Механизмы башенных кранов и системы управления
Рабочими движениями самоходного башенного крана, обеспечивающими доставку груза от любой точки места складирования до проектного положения на сооружении, являются подъем груза, изменение вылета крюка, передвижение по путям, поворот стрелы. Эти рабочие движения выполняются соответственно механизмами: грузоподъемным, вылета крюка, передвижения крана, поворота.
Грузоподъемный механизм башенных кранов (рис. 91) состоит из типовой реверсивной однобарабанной электролебедки (которая имеет электродвигатель 1, муфту 2, барабан 3, редуктор 4), направляющих блоков 5, канатного полиспаста 6 и крюковой обоймы 7. На рис. 91, а показана кинематическая схема грузоподъемного механизма башенного крана с управляемой стрелой. Неподвижный конец каната полиспаста у этих кранов крепится к рычагу ограничителя грузоподъемности 9, установленному на конструкции стрелы, а неподвижный блок полиспаста находится на оголовке стрелы.
Для обеспечения малых посадочных скоростей у башенных кранов, предназначенных для монтажных работ, применяют многоскоростные лебедки или лебедки с регулированием скорости специальной электроаппаратурой, включаемой в электросхему крана.
На рис. 91,6 показана схема грузовой лебедки башенного крана со встроенным тормозным генератором.
Короткозамкнутый ротор тормозного генератора 8 насаживается на первичный вал редуктора 4, а статор фланцем крепится к корпусу редуктора. При прохождении тока в обмотке возбуждения статора создается неподвижное магнитное поле, взаимодействие которого с током, возникающим во вращающемся роторе, создает тормозной момент. Величина этого момента зависит от силы тока в обмотке возбуждения и скорости вращения. Изменяя силу тока в обмотке, можно менять величину тормозного момента и соответственно замедлять скорость вращения электродвигателя 1 лебедки.
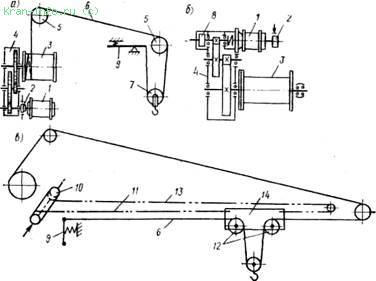
Рис. 91. Схемы грузоподъемных механизмов башенных кранов
У башенных кранов с грузовой тележкой на стреле схема запасовки грузового каната (рис. 91,в) отличается от описанной выше тем, что неподвижный конец каната 6 грузового полиспаста крепится к рычагу ограничителя 9, установленного у основания стрелы, а неподвижные блоки 12 полиспаста находятся на грузовой тележке 14, перемещающейся по стреле.
Механизм изменения вылета крюка башенных кранов. У кранов с грузовой тележкой (рис. 91, в) изменение вылета достигается реверсивной электролебедкой 10 и системой направляющих блоков с тяговыми канатами 11 и 13, образующими бесконечную/ петлю, охватывающую направляющий блок, расположенный у оголовка стрелы. Концы канатов присоединены к барабану лебедки таким образом, что когда один конец навивается, то другой, наоборот, свивается, благодаря чему обеспечивается возвратно-поступательное перемещение грузовой тележки.
Конечные положения тележки на стреле фиксируются концевыми выключателями.
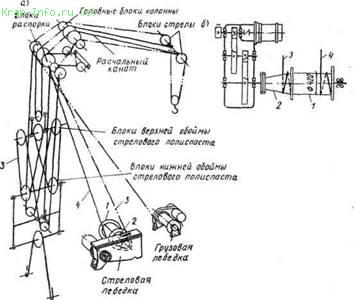
Рис. 92. Схема механизма изменения вылета маневровой стрелы
а — схема запасовки канатов; б — кинематическая схема лебедки механизма изменения вылета стрелы
Благодаря применению грузовой тележки, передвигающейся на стреле, достигается горизонтальное перемещение груза, что создает особые преимущества при выполнении краном монтажных работ.
Механизм изменения вылета крюка башенных кранов с управляемой (маневровой) стрелой состоит из типовой реверсивной электролебедки, направляющих блоков и канатного полиспаста.
В целях обеспечения более прямолинейной и горизонтальной траектории перемещения груза при изменении вылета крюка стрелоподъемная лебедка башенных кранов (рис. 92) выполняется с двумя барабанами
1 и 2, на один из которых навивается канат стрелового полиспаста 4, а на другой во встречном направлении обратная ветвь каната 3 грузоподъемного полиспаста. При навивании каната стрелоподъемного полиспаста канат грузоподъемного полиспаста свивается. Соотношение диаметров барабанов 1 и 2 и их профиль подбирают так, чтобы при подъеме или опускании стрелы груз не изменял своего положения по высоте над уровнем земли. Однако при спрямлении траектории перемещения груза не устраняется его раскачка. Эти недостатки в большей степени устраняются при изменении вылета грузоподъемного крюка крана путем перемещения грузовой тележки по горизонтально расположенной стреле.
Механизм передвижения башенных кранов состоит из электродвигателей, соединительной муфты и колодочного тормоза, редуктора, ведущих шестерен и зубчатых венцов, соединенных с ободами ходовых колес.
Краны небольшой грузоподъемности опираются на четыре ходовых колеса, из которых два приводных расположены на разных рельсах и являются ведущими. Привод к ним осуществляется от одного электродвигателя. Имеются конструкции, у которых два ведущих колеса расположены на одном рельсе.
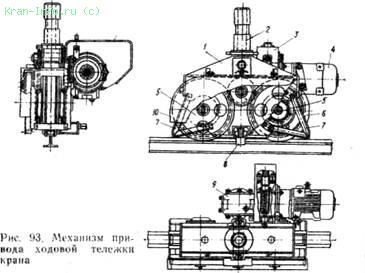
Современные башенные краны грузоподъемностью от 5 т и выше опираются на четыре балансирные тележки, имеющие по два или более ходовых колеса. Две из четырех тележек являются приводными, у которых привод к ходовым колесам осуществляется электродвигателем, смонтированным на раме тележки. Обычно приводные тележки расположены по диагонали на разных рельсах подкранового пути.
На рис. 93 показан типовой механизм привода ходовой тележки башенного крана, состоящей из следующих сборочных единиц и деталей: балансирной рамы У, ходовых колес 5 с зубчатыми венцами 6, электродвигателя 4 и редуктора 9, колодочного тормоза 3 и противоугонного захвата 8. Для очистки рельса служат сбрасывающие ножи 7 и для предотвращения попадания посторонних предметов в зубчатый венец служит кожух 10. Вертикальная ось (шкворень) 2 совместно с поворотным кронштейном (флюгером) создает возможность движения крана по криволинейным путям.
Механизм поворота башенных кранов с поворотной башней (рис. 94) монтируется на площадке поворотной платформы 2. Ведущая шестерня 1 редуктора 3, 5 находится в зацеплении с зубчатым венцом 6 шарикового (роликового) опорно-поворотного устройства, укрепленным на опорной раме 7 ходовой части крана. Фланцевый электродвигатель 4 установлен вертикально на торце редуктора. На рис. 94, а показан типовой механизм поворота с планетарным редуктором, на рис. 94,6 — типовой механизм поворота с редуктором, имеющим две пары цилиндрических зубчатых передач.
У кранов с неповоротной башней механизм поворота (рис. 95) монтируется на площадке у головной части башни и состоит из электродвигателя /, соединительной муфты 2 с тормозом, червячного редуктора 3 с встроенной муфтой предельного момента, открытой зубчатой пары 4, вертикального вала 5 с ведущей шестерней 7, цевочного колеса 6 и опорных роликов 8. Муфта предельного момента регулируется таким образом, чтобы при чрезмерно резком торможении или, наоборот, запуске происходила небольшая пробуксовка, уменьшающая динамические нагрузки.
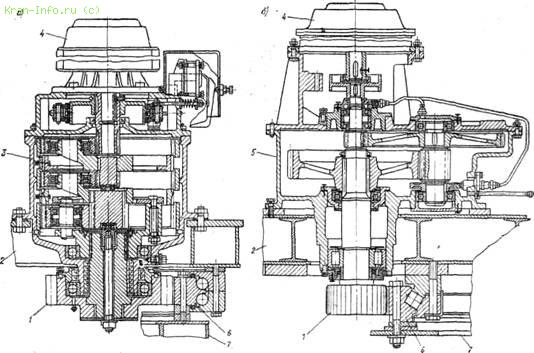
Рис. 94. Механизмы поворота башенных кранов с поворотной башней
Механизмами башенных кранов управляют из кабины крановщика, размещенной у кранов с" поворотной башней сбоку верхней ее части (см. рис. 85), а у кранов с неповоротной башней сбоку поворотного оголовка (см. рис. 88). У кранов большой грузоподъемности и высоты подъема кабина размещается на портале (см. рис. 87). Для связи крановщика с монтажниками конструкций применяют телефонную или радиосвязь.
Пульт управления механизмами у некоторых кранов делается выносным, обеспечивая дистанционное управление краном. Известны также конструкции кранов с управлением по радиосвязи.
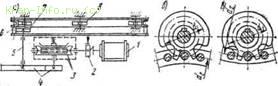
Рис. 95. Механизм поворота башенных кранов с неповоротной башней
а — общая кинематическая схема; б, в, г — цевочная передача с внешним и внутренним расположением ведущей шестерни
Кабина крановщика (рис. 96) должна быть оборудована с учетом наибольших удобств, с хорошим обзором фронта работ и грузоподъемного органа, удобным расположением рукоятей приборов управления и пр.
Питание электродвигателей механизмов башенных кранов осуществляется гибким кабелем, подвешиваемым на шторной подвеске или навиваемым на кабельный барабан.

Рис. 96. Кабина башенного крана
Каждый кран должен быть оборудован приборами
управления ограничения грузоподъемности, высоты подъема, конечных движений, а также указателем интенсивности ветрового напора (скорости ветра) и противоугонными устройствами.
Навигация: Начало Оглавление | Другие книги | Отзывы: - 0
- 0 Оставить свой отзыв
Оставить свой отзыв