Книга: Башенные краны
Навигация: Начало Оглавление | Другие книги | Отзывы:  - 4
- 4
 - 4
- 4§ 62. Электрическая схема крана КБ-674
Для привода механизма передвижения крана применены асинхронные электродвигатели с фазным ротором, управляемые магнитным контроллером. В приводе монтажной лебедки и лебедки контргруза использованы асинхронные электродвигатели с короткозамкнутым ротором, управляемые с помощью кнопок. В приводе грузовой лебедки применен двигатель постоянного тока с тиристорным преобразователем, принцип работы которого рассмотрен в § 50. Для привода механизма поворота и грузовой тележки на кране используются двигатели постоянного тока, питаемые от кремниевых выпрямителей. Регулирование частоты вращения в этих приводах осуществляется изменением сопротивления реостата в якорной цепи.
Принципиальная электрическая схема привода грузовой тележки крана показана на рис. 123 и 124.
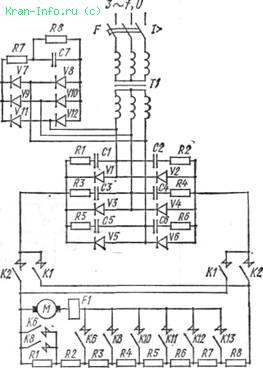
Рис. 123. Принципиальная электрическая схема силовой цепи электропривода грузовой тележки крана КБ-674
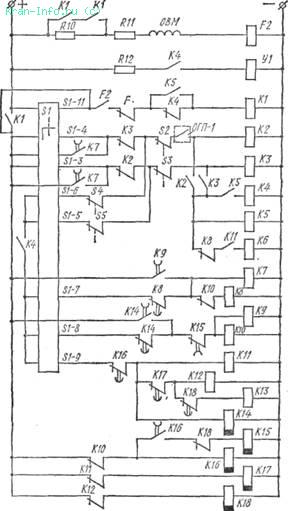
Рис. 124. Принципиальная электрическая схема цепи управления электропривода грузовой тележки крана КБ-674
Двигатель и цепь управления работают на постоянном токе, получаемом от выпрямительных блоков. Двигатель управляется магнитным контроллером с помощью командоконтроллера S1. Реверсирование двигателя осуществляется с помощью контакторов К1 и К2 в цепи якоря. Последовательность замыкания контактов командоконтроллера приведена в табл. 19.
При переводе рукоятки командоконтроллера из первого положения в последующие включаются контакторы Кб, KS, КЮ, KU, которые закорачивают ступени реостата в цепи якоря двигателя. Контакторы К12 и К13 включаются автоматически под контролем реле времени К17, К18 после установки рукоятки командоконтроллера в четвертое положение.
Таблица 19. Замыкания контактов командоконтроллера привода грузовой тележки крана КБ-674 (к рис. 124)
|
Положения рукоятки |
|||||||||
|
Контакт |
«Назад» |
0 |
«Вперед» |
||||||
|
4 |
* |
2 |
1 |
1 |
2 |
3 |
4 |
||
|
S1-3 |
X |
X |
X |
X |
|||||
|
S1-4 |
X |
X |
X |
X |
|||||
|
S1-5 |
X |
X |
X |
X |
|||||
|
S1-6 |
X |
X |
X |
X |
|||||
|
S1-7 |
X |
X |
X |
X |
X |
X |
|||
|
S1-8 |
X |
X |
X |
X |
|||||
|
S1-9 |
X |
X |
|||||||
|
S1-11 |
X |
||||||||
X — контакт замкнут.
При подходе грузовой тележки на расстояние 10 м к башне крана или на расстояние 8,5 м к головной части стрелы электропривод автоматически переходит на пониженную частоту вращения, так как срабатывают конечные выключатели S4, 55 и в цепь якоря двигателя вводится полное сопротивление реостата.
По такому же принципу производится управление приводом механизма поворота крана, но в первом положении рукоятки включаются только тормозные электромагниты, растормаживая механизм, а двигатели выключены. Во втором положении механизм работает на малой частоте вращения, в следующих положениях частота возрастает, достигая максимального значения в последнем положении рукоятки.
При переводе рукоятки командоконтроллера из рабочего положения в нулевое происходит динамическое торможение привода с последующим наложением тормозов.
· § 57. Электрическая схема крана АБКС-5
· § 58. Электрическая схема крана КБ-401А
· § 59. Электрическая схема крана С-981А
· § 60. Электрическая схема крана K5-573
· § 61. Электрическая схема крана КБ-503
> · § 62. Электрическая схема крана КБ-674
· § 63. Управление кранами
Навигация: Начало Оглавление | Другие книги | Отзывы: - 4
- 4Книга: Башенные краны
 Оставить свой отзыв
Оставить свой отзыв
| автор: | хУипутоло 
Отзыв полезен?
Да 1 /
Нет
|
# 4 |
| комментарий: | ДА кому это вообще может быть интересно | |
| ответить | Дата комментария: 14.10.2019 17:05:25 | |
| автор: | александр
Отзыв полезен?
Да 10 /
Нет 9
|
# 3 |
| комментарий: | Все нормально!Надо еще марки редукторов обозначить на каждый кран, чертежи с размерами шестерен и валов | |
| ответить | Дата комментария: 17.04.2015 16:27:44 | |
| автор: | валерий
Отзыв полезен?
Да 19 /
Нет 17
|
# 2 |
| комментарий: | Да литература хорошая но информацыи мало а так молодцы что хотя даете такую информацыю спасибо большое | |
| ответить | Дата комментария: 02.03.2014 11:14:22 | |
| автор: | Алекс
Отзыв полезен?
Да 36 /
Нет 17
|
# 1 |
| комментарий: | Отличная книга, буду рекомендовать ее всем знакомым крановщикам, хотя многое устарело - азы остаются неизменными. | |
| ответить | Дата комментария: 16.04.2013 00:01:29 | |