Книга: Башенные краны
Навигация: Начало Оглавление | Другие книги | Отзывы:  - 4
- 4
 - 4
- 4§ 50. Электроприводы грузовых лебёдок башенных кранов с большой высотой подъема груза
Электроприводы грузовых лебедок кранов с большой высотой подъема груза должны отвечать несколько иным, чем для обычных кранов, требованиям. Рабочая скорость подъема груза должна быть достаточно большой. При этом желательно, чтобы подъем легких и средних грузов производился с большей скоростью, чем подъем номинального груза, так как это позволяет уменьшить мощность электродвигателя. Грузовая лебедка должна иметь низкую посадочную скорость для выполнения краном монтажных операций.
Подъем и спуск крюковой подвески без груза должен производиться с большей скоростью, чем при работе с грузом.
Рассмотренные ранее электроприводы грузовых лебедок не могут удовлетворять этим требованиям, поэтому на кранах для высотного строительства используют специальные системы привода. Окончательный вариант привода, полностью удовлетворяющего перечисленным требованиям, еще не определился и в настоящее время разработка специального привода грузовых лебедок идет в нескольких направлениях.
На ряде кранов (КБ-573) механизм подъема груза состоит из двух грузовых лебедок, работающих на общий полиспаст. Каждая из лебедок имеет свой электропривод, в одном из которых использована тормозная машина для получения посадочной скорости. На ряде кранов (КБ-503, КБ-674) для привода грузовых лебедок применяют двигатели постоянного тока.
Из формулы следует, что частоту вращения двигателя можно регулировать, изменяя напряжение, магнитный поток и сопротивление цепи якоря.

Рис. 96. Механические характеристики двигателя постоянного тока независимого
возбуждения: 1 — естественная, II—VII — искусственные
На рис. 96 показаны механические характеристики двигателя постоянного тока независимого возбуждения при регулировании магнитного потока (характеристики 11 и 111), при регулировании подводимого к двигателю напряжения (характеристики IV и V) и при изменении сопротивления в цепи якоря (характеристики VI и VII).
В электроприводах грузовых лебедок башенных кранов частота вращения двигателей постоянного тока регулируется изменением подводимого к двигателю напряжения и потока двигателя.
На кране КБ-503 привод грузовой лебедки осуществлен с помощью системы генератор — двигатель (система г — д). Функциональная схема привода грузовой лебедки показана на рис. 97, а.
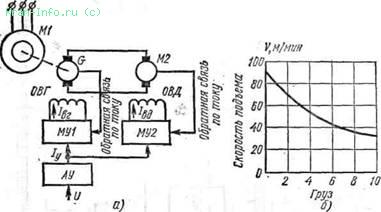
Рис. 97. Электропривод постоянного тока (система г — д) грузовой лебедки:
с — функциональная электрическая схема, б — механическая характеристика привода
Асинхронный электродвигатель Ml приводит во вращение генератор постоянного тока G, который является источником питания для двигателя постоянного тока М2. Напряжение генератора регулируется с помощью обмотки возбуждения генератора ОВГ. Обмотка возбуждения генератора получает питание через рабочие обмотки магнитного усилителя МУ1, с помощью которого производится изменение величины и направления тока возбуждения 1п,г, т.е. регулирование напряжения генератора и реверсирование двигателя М2. Обмотка возбуждения двигателя получает питание через магнитный усилитель МУ2. Величина тока управления 1у задающих обмоток управления магнитных усилителей определяется положением рукоятки аппарата управления Л У. С помощью других обмоток управления осуществляется обратная положительная связь магнитных усилителей по току якоря двигателя. В результате комбинированного регулирования напряжения генератора и возбуждения двигателя механическая характеристика привода имеет гиперболическую форму (рис. 97, б). При неизменной потребляемой мощности двигатель М2 будет иметь различные скорости в зависимости от груза на крюке. Например, на кране КБ-503 диапазон изменения скорости грузовой лебедки составляет от 30 м/мин при грузе 10 т, до 90 м/мин при работе без груза.
Использование в приводе магнитных усилителей с обратными связями обеспечивает жесткие механические характеристики привода при пониженном напряжении, что дает возможность получить низкие посадочные скорости в первом и втором положениях спуска. Недостатком привода является большое количество электрических машин и аппаратов (приводной двигатель, генератор, магнитные усилители).
Структурная схема привода показана на рис. 98.
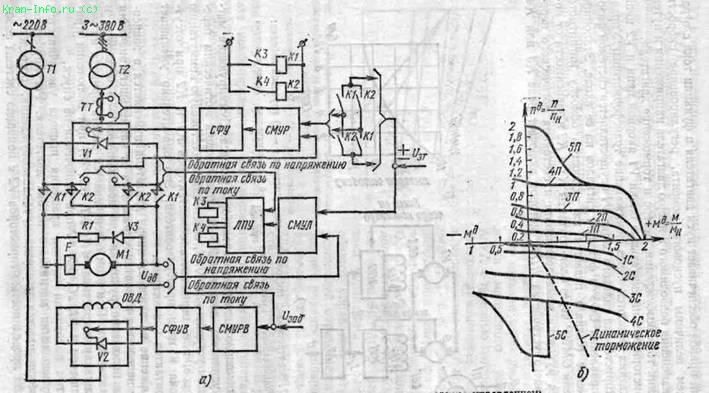
Рис. 98. Электропривод постоянного тока с тиристорным управлением:
а - структурная схема, б - механические характеристики привода; СФУ, СФУВ - блоки системы Фазового управления тиристорами, СМУР, CMWB - суммирующие магнитные усилители, ЛПУ-логическое переключающее устройство, (суммирующий магнитный усилитель логики
Тиристорный привод обеспечивает пуск двигателя в функции тока с ограничением величины пускового момента, регулирование скорости путем изменения подводимого к якорю двигателя напряжения и путем изменения тока возбуждения, реверс и торможение двигателя.
Тиристорные выпрямительные блоки VI якорной цепи и V2 цепи возбуждения питаются через понижающие трансформаторы. Управление тиристорами силового блока VI осуществляется системой фазового управления СФУ в функции сигналов на ее входе. Эталонное напряжение (сигнал) подается на задающую обмотку магнитного усилителя СМУР через блок-контакты К1 и К2 в зависимости от положения рукоятки командоаппарата и состояния логического переключающего устройства ЛПУ, которое включает реле КЗ или К4 с их помощью включает контакторы реверса. Суммирующий магнитный усилитель логики СМУЛ, управляющий логическим переключающим устройством ЛПУ, обеспечивает бестоковую коммутацию контакторов, т. е. переключение контакторов К1 и К2 при отсутствии тока в цепи преобразователя. Это значительно уменьшает износ контактов контакторов.
Напряжение на зажимах якоря двигателя изменяется в зависимости от положения рукоятки управления от наименьшего значения В первом положении рукоятки до номинального — в четвертом и пятом положениях. При этом обеспечивается работа привода на механических характеристиках 1П, 2П, ЗП, 4П при включении привода на подъем и 1С, 2С, ЗС, 4С при включении на спуск.
В пятом положении частота вращения привода увеличивается SB счет уменьшения магнитного потока двигателя. Регулирование потока обеспечивается изменением тока возбуждения, посредством управления проводимостью тиристоров V2 с помощью системы фазового управления СФУВ. Пятое положение предназначено для подъема и спуска крюка и легких грузов.
В приводе предусмотрено сопротивление R1 динамического торможения, которое с помощью диода V3 включается в цепь якоря только при работе двигателя на спуск. Цепь динамического торможения повышает надежность работы схемы (при неисправности схемы груз опускается под контролем динамического торможения) и исключает просадки груза при переключениях рукоятки управления.
· § 44. Назначение, правила выполнения и классификация электрических схем
· § 45. Общие положения о регулировании скорости крановых механизмов
· § 46. Асинхронный электропривод, в котором использован электродвигатель с короткозамкнутым ротором
· § 47. Асинхронный электропривод, в котором используется электродвигатель с фазным ротором
· § 48. Асинхронный электропривод с созданием на валу электродвигателя добавочного тормозного момента
· § 49. Многодвигательный электропривод с планетарным механизмом
> · § 50. Электроприводы грузовых лебёдок башенных кранов с большой высотой подъема груза
· § 51. Тиристорная схема управления асинхронным электродвигателем
Навигация: Начало Оглавление | Другие книги | Отзывы: - 4
- 4Книга: Башенные краны
 Оставить свой отзыв
Оставить свой отзыв
| автор: | хУипутоло 
Отзыв полезен?
Да 1 /
Нет
|
# 4 |
| комментарий: | ДА кому это вообще может быть интересно | |
| ответить | Дата комментария: 14.10.2019 17:05:25 | |
| автор: | александр
Отзыв полезен?
Да 10 /
Нет 9
|
# 3 |
| комментарий: | Все нормально!Надо еще марки редукторов обозначить на каждый кран, чертежи с размерами шестерен и валов | |
| ответить | Дата комментария: 17.04.2015 16:27:44 | |
| автор: | валерий
Отзыв полезен?
Да 19 /
Нет 17
|
# 2 |
| комментарий: | Да литература хорошая но информацыи мало а так молодцы что хотя даете такую информацыю спасибо большое | |
| ответить | Дата комментария: 02.03.2014 11:14:22 | |
| автор: | Алекс
Отзыв полезен?
Да 36 /
Нет 17
|
# 1 |
| комментарий: | Отличная книга, буду рекомендовать ее всем знакомым крановщикам, хотя многое устарело - азы остаются неизменными. | |
| ответить | Дата комментария: 16.04.2013 00:01:29 | |